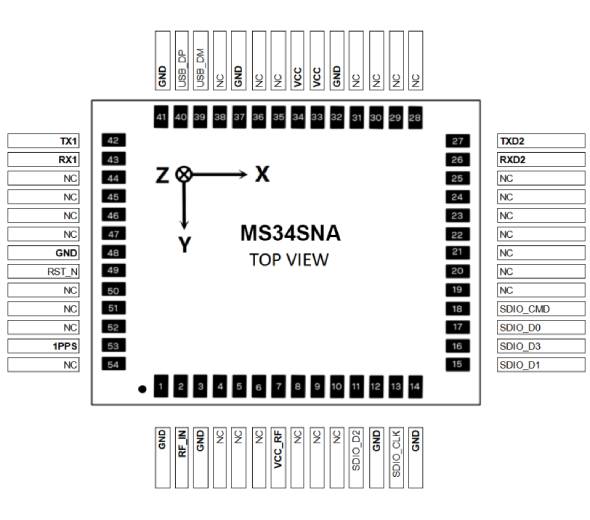
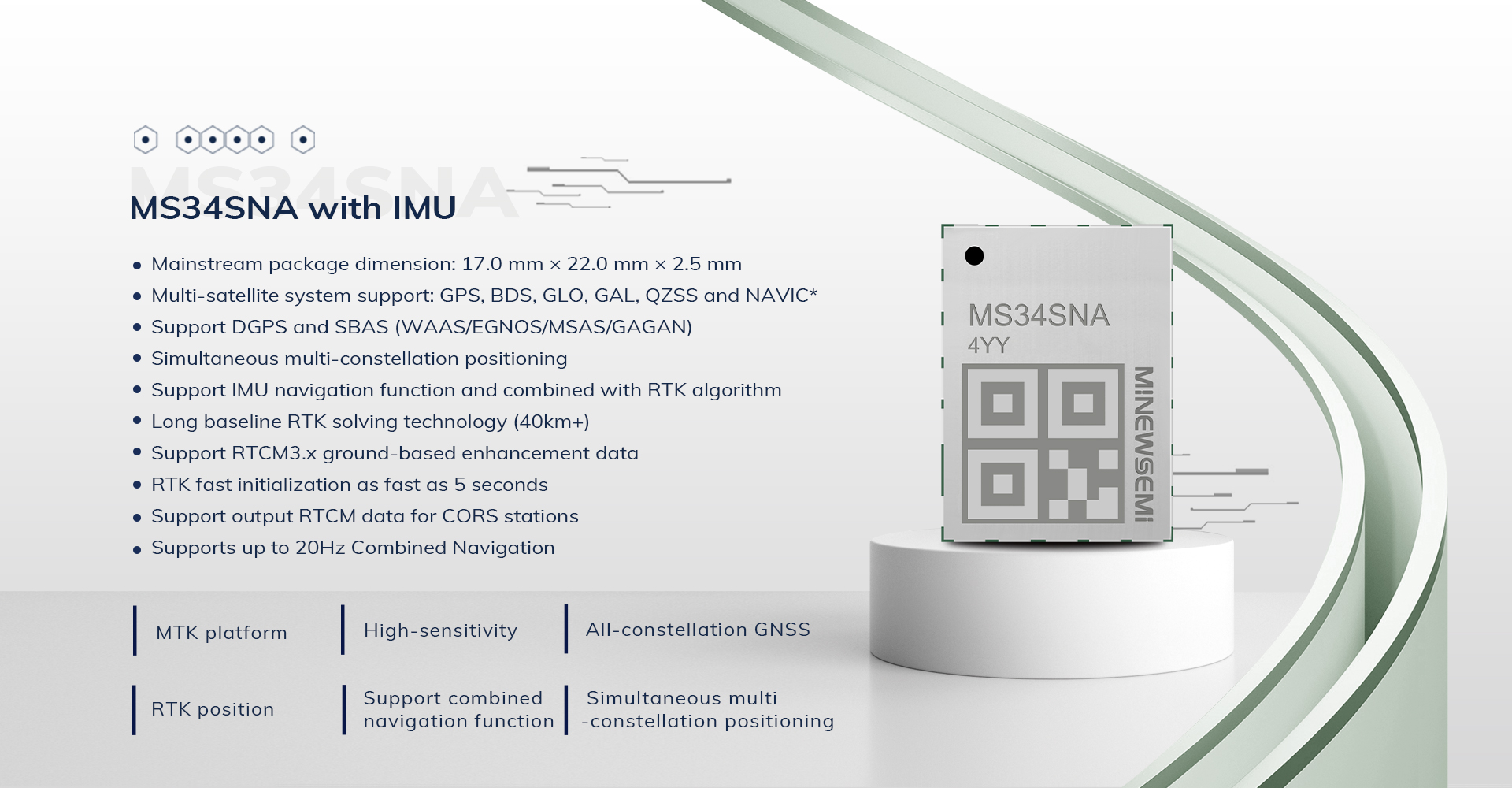
MS34SNA with IMU is a high dynamic, supporting simultaneous multi-constellation positioning and L1+L5, GNSS module with integrated RTK positioning engine. Built-in 12nm advanced process GNSS Soc chip, integrated dual-core Cortex A7 1.2GHz high-performance computing processor, the module supports GPS, BDS, GLONASS, GALILEO and QZSS multi-satellite systems, and integrates 6-axis sensors (3-axis gyroscope) + 3-axis accelerometer) and GNSS RTK tightly combined algorithm engine, MS34SNA can achieve centimeter-level positioning accuracy, greatly improve the positioning accuracy of the device, and support a maximum 20Hz fusion positioning refresh rate.
The module makes it ideal for industrial-type applications in the automotive sector (e.g. T-Box, car navigation, V2X), transportation sector (e.g. industrial vehicles, operational vehicle supervision), shared electric bikes, smart agriculture, etc.
Parameter | Specification |
Engine | MTK 530MHz ARM Cortex-M4 FPU and MPU, 12nm advanced process |
GNSS | GPS: L1 C/A, L5 BDS: B1I, B2a, GLONASS: L1 GALILEO: E1, E5a QZSS:L1 C/A, L5 SBAS: WAAS,EGNOS,MSAS,GAGAN,SDCM NAVIC*:L5 (optional) |
Working Frequency | GPS/QZSS L1:1575.42±1.023MHz L5: 1176.45MHz±10.23MHz BDS B1I:1561.098MHz±2.046MHz B2a: 1176.45MHz±20.46MHz GLONASS G1:1601.71875MHz±3.91175MHz GALILEO E1: 1575.42±2.046MHz E5a: 1176.45MHz±10.23MHz NAVIC*: L5 (optional) L5: 1176.45MHz±10.23MHz |
Sensitivity1 | Cold Start:-148dBm; Re-capturing:-160dBm; Tracking:-165dBm; |
First location time1 | Cold Start:≤24s; Hot Start:1s; AGPSassisted:<6s; |
Fixed solution convergence time | ≤10s |
Position Precision2 | Single point location: Open Sky:<1.5m CEP Complex urban environment:<2.5m CEP RTK: Horizontal positioning accuracy:0.8cm+1PPM CEP Elevation accuracy:2cm+1PPM CEP |
Speed Precision2 | <0.05m/s |
Time Precision2 | 20ns |
Attitude Accuracy | Kappa and Omega angle: 0.02° (1σ); Phi angle: 0.2° (1σ) |
Gyroscope Accuracy | accuracy:±1000°/s; Bias Stability±4.5°/h; Velocity Random Walk0.75°/√h |
Accelerometer Accuracy | accuracy:±16g; Bias Stability±0.25mg/h; Velocity Random Walk0.3m/s/√h |
Work Temperature | -40℃ ~ +85℃ |
Refresh Frequency | GNSS RTK:Max 10Hz; Attitude maximum10Hz;Sensor:Max 50Hz configurable; |
Baud rate | 115200bps (default) |
RTCM differential output | Support RTCM2.x, RTCM3.x output,MSM4/MSM7 |
Protocol | NMEA 0183 protocol Ver. 4.0/4.1 RTCM 2.3/2.4/3.0/3.2 |